Using the Drive Motors
Note: If you will be testing and using your drive control, I highly recommend putting Jimmy-Kyle on the floor. A fall off a desk or table could break the bot or damage the brain!
The drive control allows you to work two motors together so that Jimmy-Kyle can drive around.
The first task to setting up the drive control is to tell the brain which motor is which. If the bot has been properly set up, you should be able to set up your drive control like this:

Drive setup establishes the connections between the brain and the motors.
Once the drive control is set up, the commands forward, backward, left, right and stop should work properly. Forward and backward are pretty straight forward, although the robot will not always go 100% in a straight line due to the nature of working with LEGO parts. Left and right are less of a left/right turn in a car, and more spinning in place due to Jimmy-Kyle’s swivel wheel in the rear. And stop will make all drive motors stop.
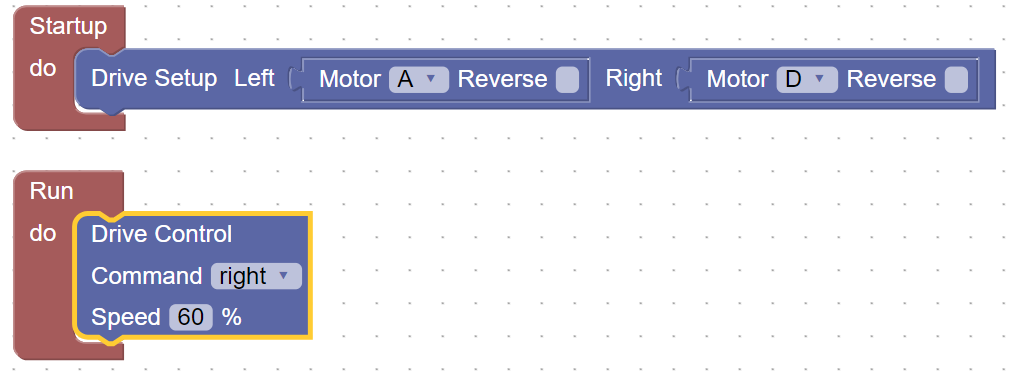
Set up the drive control first, then run your actions.
I would recommend running a small test of this to make sure it is behaving properly. If it seems to be going in the wrong direction, check that your wired connections match the letters. You can also try checking reverse on both motors if they are spinning the wrong way.
If you ever need to stop an action, just click the stop button on the gigabot programming screen.
Once you have that worked out, you can put actions together using your sensors.
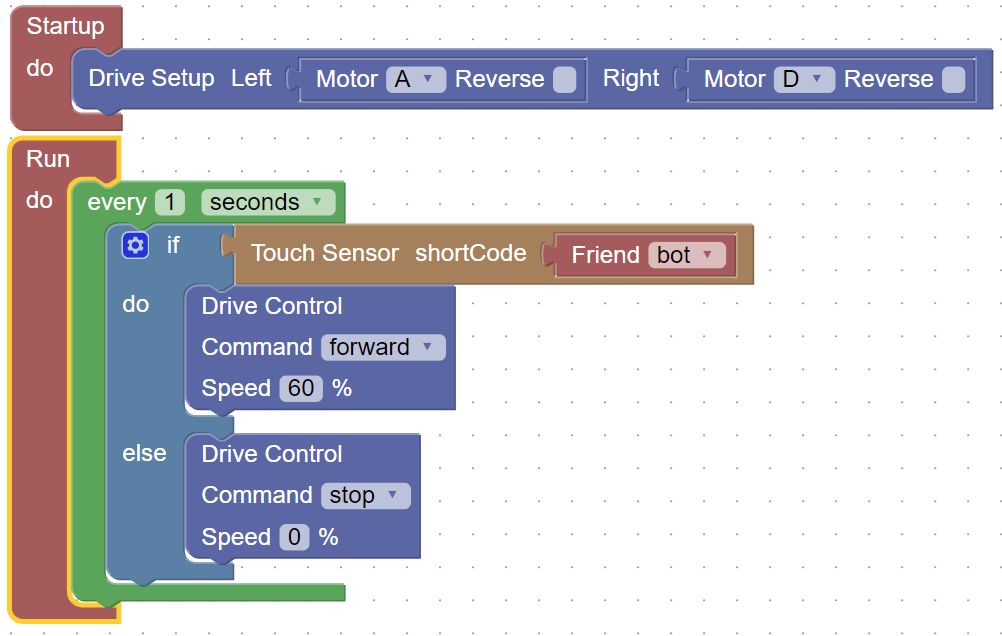
If the touch button is pushed, Jimmy-Kyle goes. If not, it stops.
NEW! The drive controls now have timer options on them.
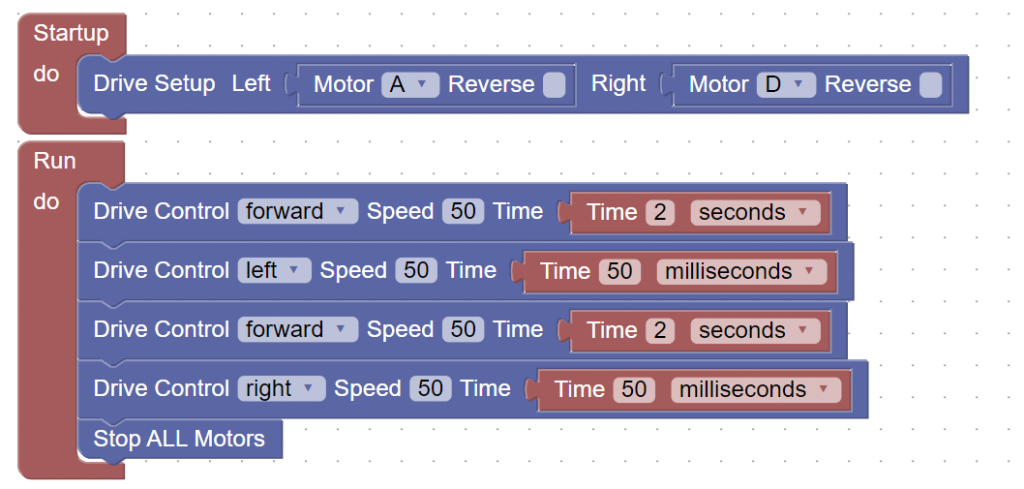
See this in action here. Is half a second (500 milliseconds) enough time to get a quarter turn? All bots are slightly different, as they are hand built — can you adjust the timing for your own bot to make it exactly a quarter turn?
 Previous Post
Previous Post Next Post
Next Post