Operating the Grabber Arms
You can use the grabber arms in a few different ways on the robot – in terms of other actions, just as a general run motor operation, or in response to sensor input.
Jimmy-Kyle is equipped with a touch sensor below the grabber arms, which could be used as a button for kids to press or as a bumper so that Jimmy-Kyle can run into an object and then grab it.
This is the basic operation for Jimmy-Kyle’s grabber:
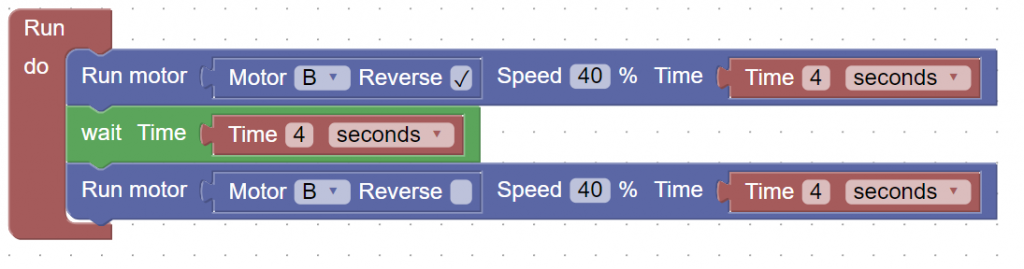
This says: Run motor B in reverse at 40% speed for 4 seconds to close arms. Wait 4 seconds. Run motor B at 40% speed for 4 seconds to open arms.
Reverse is the direction that closes the arms, normal direction is what opens them again. (The pause was added in the middle for effect.) If the arms are open as far as they can be, the timing on them is 4 seconds. If they are in this sort of position

Where they are nearly straight out or maybe a little back, they need 3 seconds to open and close. (I also reduced the speed on the motors to avoid them slamming into each other if I was wrong on the timing.)
If you want to put the code together with a sensor, it would look more like this:
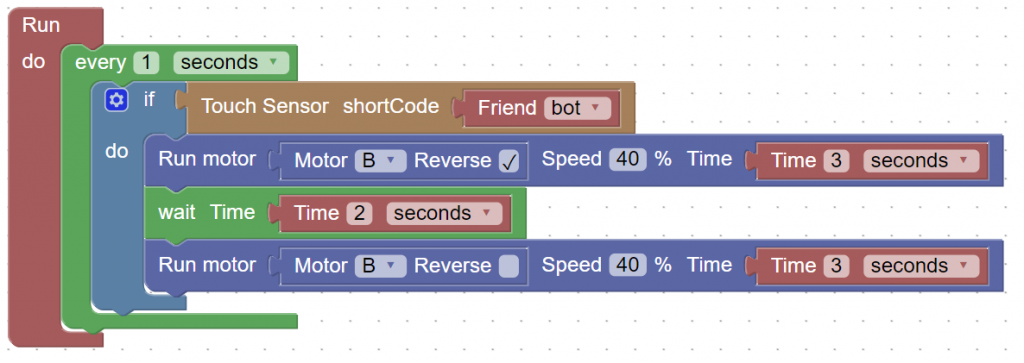
This says: Check every second to see if touch sensor is pushed. If it’s pushed, Run motor B in reverse at 40% speed for 3 seconds to close. Wait 2 seconds. Run motor B at 40% speed for 3 seconds to open.
The code above checks the sensor periodically to see if anyone is touching it, and then performs the action if it sees the sensor is on. It translates to this sort of action:
You can can combine these ideas with other actions to make the bot capture an object or perform other tasks.
 Next Post
Next Post